Kuolleen ajan laskenta (Dead Reckoning) – navigointi ilman GPS
Kuolleen ajan laskenta (Dead Reckoning) — navigointi ilman GPS:ää: opi sijainnin arviointi nopeuden, suunnan ja viimeisen tunnetun pisteen perusteella hätätilanteisiin.
Dead Reckoning (tai DR) on menetelmä sijainnin arvioimiseksi. Se on tärkeä osa navigointia. Siinä käytetään viimeksi tunnettua pistettä (kiintopistettä) sekä nopeutta ja suuntaa, johon ajoneuvo tai henkilö on liikkunut sen jälkeen, kun se oli kiintopisteessä, jotta voidaan arvata nykyinen sijainti. Menetelmä perustuu liikkeen integraatioon ajan yli: tunnetusta paikasta edetään etäisyyden ja kurssin mukaan.
Sitä käytetään aluksen tai lentokoneen tai joskus myös maalla olevan ajoneuvon sijainnin seurantaan. Nykyään käytetään maailmanlaajuista paikannusjärjestelmää (GPS), eikä kuolleen ajan laskenta ole enää niin keskeinen kaikissa tilanteissa. Sitä käytetään kuitenkin edelleen alueilla, joilla GPS ei ole käytettävissä, tai lyhytaikaisesti, jos GPS-päivitystä ei ole saatu. Se on myös hyvä tietää siltä varalta, että GPS-satelliitit vahingoittuvat auringonpurkauksen vuoksi tai laitteet katoavat tai rikkoutuvat, joten sitä opetetaan edelleen purjehtijoille ja lentäjille.
Dead Reckoning on se, miten merimiehet kartoittivat maailmaa sen jälkeen, kun Kristoffer Kolumbus saapui Uuteen maailmaan. Tähtien avulla he pystyivät löytämään leveysasteet (päiväntasaajan ja napojen välinen etäisyys). Mutta ennen tarkkojen kellojen luomista he eivät pystyneet määrittämään pituusastettaan (kuinka kaukana idässä tai lännessä he olivat), elleivät nähneet maata, jonka he tunsivat. Niinpä valtamerten ylittämiseen käytettiin kuolleen ajan laskentaa. Näin myös Richard Byrd lensi ensimmäisenä ihmisenä pohjoisnavalle vuonna 1926. Hän pystyi lentämään 16 tuntia ja palaamaan takaisin paikkaan, josta hän oli lähtenyt, ja hänen allaan oli vain jääkenttiä.
Kuvagalleria
3 Kuvat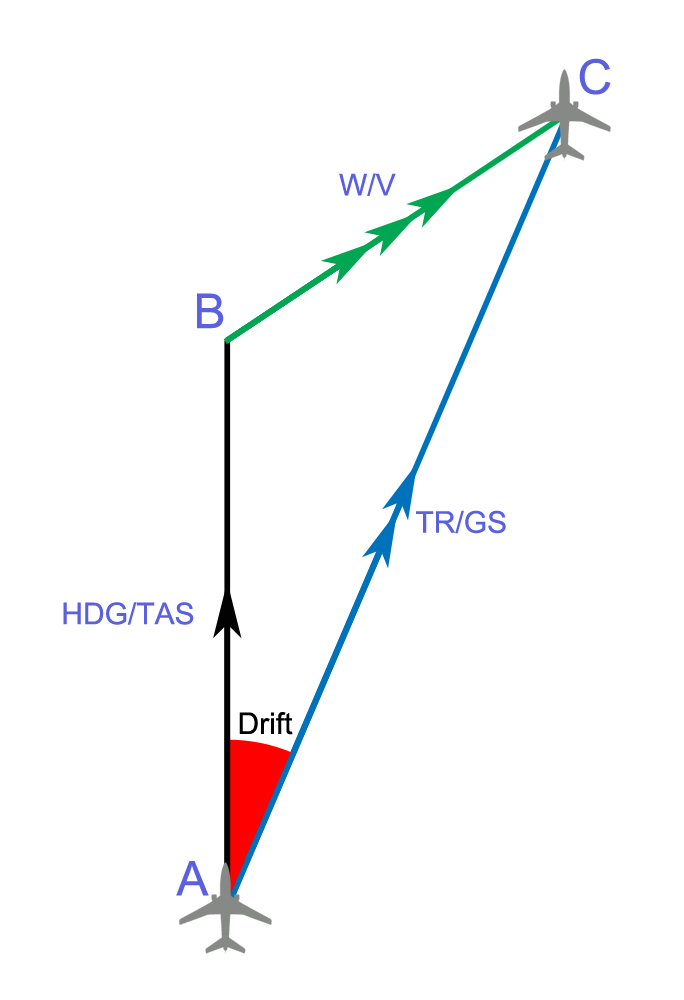


Miten kuolleen ajan laskenta toimii käytännössä
- Alkupiste: tarvitaan viimeksi tunnettu sijainti (leveys- ja pituusaste tai paikallinen koordinaatti).
- Nopeus: liikkuvan aluksen tai ajoneuvon nopeus mittauksena (solmuina, km/h tai m/s).
- Suunta/kurssi: kompassi- tai gyroskooppimittausten perusteella saatava kulma suhteessa pohjoiseen tai muuhun referenssiin.
- Aika: kuinka kauan on kuljettu sen jälkeen, kun viimeinen tunnettu paikka tiedettiin.
Yksinkertaisin laskukaava tasaisella tasolla on periaatteessa: uusi paikkakoordinaatti = vanha paikka + nopeus × aika suunnan mukaan (käyttäen trigonometriaa komponenttien laskemiseen). Maantieteellisillä etäisyyksillä käytetään usein suurempaa tarkkuutta vaativia suurempien ympyröiden laskutoimituksia (esim. suorat etäisyydet napojen ja päiväntasaajan huomioon ottaen).
Virheet ja rajoitukset
- Kertyvät virheet: pienet mittausvirheet ajautuvat yhteen ajan myötä ja voivat johtaa merkittäviin poikkeamiin (drift).
- Anturivirheet: kompassivirheet, nopeusmittarin epätarkkuus, pyörien luisto tai virheelliset kiihtyvyysanturin nollapisteet kasvattavat epävarmuutta.
- Ympäristötekijät: virrat, tuuli tai mäkinen maasto voivat muuttaa todellista etenemistä verrattuna laskettuun.
- Kumulatiivinen kasvu: virhe yleensä kasvaa ajassa, joten DR on luotettavin vain rajallisen ajan kuluessa viimeisestä sijaintivarmistuksesta.
Tekniikat ja välineet
Perinteisessä merinavigoinnissa käytetään kompassia, nopeusmittaria (log), sekstanttia ja tähdistön havaintoja korjaamaan DR-positioita. Maalla ja ilmailussa mukana ovat mm.:
- Inertial Navigation Systems (INS): gyroskoopit ja kiihtyvyysanturit (IMU), jotka laskevat liikettä integraation avulla — hyvin hyödyllinen GPS-vaihtoehto, mutta altis driftille.
- Odometria ja wheel encoders: erityisesti maantieajoneuvoissa ja robotiikassa käytetään pyörien pyörimisluvun perusteella laskettua etenemistä.
- Magnetometrit ja gyrocompassit: antavat suuntatiedon. Gyrot ovat vakaampia lyhytaikaisesti, magnetometrit herkkiä paikalliselle magneettisuudelle.
- Sensori-integraatio: Kalman-suodattimet ja muut datafuusiomenetelmät yhdistävät anturitiedot ja pienentävät virhettä verrattuna yksittäiseen mittaukseen.
Virheiden hallinta ja korjaukset
DR-positiota korjataan säännöllisesti tunnetuilla havainnoilla: maamerkit, merikartat, radio- tai tutkahavainnot (esim. VOR, DME, LORAN), satelliittipaikannus kun se on saatavissa tai tähtinäkö havainnot. Modernissa navigoinnissa INS ja GPS toimivat usein yhdessä: GPS antaa korjauksen INS:n driftille, ja INS pitää sijainnin laskettuna GPS-menetyksen aikana.
Nykykäyttö ja esimerkit
- Ilmailu: DR on osa lentonavigaatiota, varsinkin pitkän matkan ylityksillä ja GPS-häiriötilanteissa.
- Meri: alukset käyttävät DR:ia jatkuvaan paikannukseen, täydentäen sitä tähdistö- ja tutkalöydöillä.
- Maastoajoneuvot ja robotiikka: yhdistetty odometria, inertial- ja satelliittipaikannus mahdollistavat robustin navigoinnin.
- Sukellusveneet ja alukset veden alla: doppler- ja inertiatekniikat yhdessä DR:n kanssa antavat sijainnin, kun satelliittiyhteys ei ole mahdollista.
Termi ja historia lyhyesti
Termi "dead reckoning" tulee vanhemmasta ilmaisusta "deduced reckoning" (päättelyyn perustuva laskenta), ja käytännössä tarkoittaa sitä, että paikka päätellään tunnetusta lähtöpisteestä ja kuljetusta matkasta. Historiallisesti DR oli keskeinen menetelmä pitkille merimatkoille ennen tarkkoja ajanmittauslaitteita ja satelliittipaikannusta.
Yhteenvetona: kuolleen ajan laskenta on yksinkertainen ja perinteinen tapa arvioida sijaintia ilman ulkoista paikannusta. Se on nopea ja itsenäinen menetelmä, mutta altis virheille, joten nykyaikaiset navigointijärjestelmät yhdistävät DR:n muihin havaintoihin ja antureihin pysyvän ja luotettavan paikannuksen saavuttamiseksi.

Menetelmä
Kuoletuslaskenta alkaa tunnetusta pisteestä (kiintopisteestä). Sen jälkeen on tiedettävä ajoneuvon nopeus. Vanhoina aikoina laivat heittivät tukin laidan yli (köyteen sidottuna) ja laskivat, kuinka kauan kesti kulkea tämän tukin ohi (tai vetivät köyttä, jossa oli solmuja, ja laskivat, kuinka monta solmua saatiin vedettyä ulos tietyssä ajassa). Näin saatiin aluksen nopeus. Suunnan tunteminen kompassin avulla antaisi suunnan. Näistä kahdesta luvusta voitaisiin tehdä arvio (hyvä arvaus) ajoneuvon nykyisestä sijainnista. Tuuli kuitenkin työntää ajoneuvoa toiselle puolelle (ns. ajautuminen), joten myös tämä on mitattava. Vedessä on myös virtauksia, jopa keskellä merta. Ajan mittaan tämäkin voi aiheuttaa virheitä, joten virtausten korjaamiseksi tehtiin karttoja.
Lentokoneet voivat helposti mitata tuulen nopeuden (kuinka nopeasti ne kulkevat ilmassa), mutta eivät sitä, kuinka nopeasti ne liikkuvat maan päällä (ns. maanopeus). Vastatuuli, myötätuuli tai sivutuuli muuttaa maanopeutta. Jos lentokoneen korkeus tunnetaan, maanopeus voidaan määrittää mittaamalla, kuinka nopeasti lentokone ohittaa maassa olevan kohteen. (Mitä korkeammalla olet, sitä hitaammin maa näyttää liikkuvan). Lentokoneen lattiassa olevan ikkunan avulla voidaan selvittää maanopeus ja lentokoneen ajautuminen.
Maassa oleva ajoneuvo voi myös käyttää kuolleen laskennan menetelmää. Yleensä niiden ei tarvitse huolehtia tuulen aiheuttamasta ajelehtimisesta, eikä maalla ole virtauksia, joten laskeminen on helpompaa.
Kysymyksiä ja vastauksia
K: Mikä on Dead Reckoning?
V: Dead Reckoning (tai DR) on menetelmä, jossa sijainti arvioidaan käyttämällä viimeistä tunnettua pistettä, nopeutta ja liikesuuntaa.
K: Mihin Dead Reckoningia käytetään?
V: Dead Reckoningia käytetään aluksen, lentokoneen tai ajoneuvon sijainnin jäljittämiseen.
K: Miksi kuollutta takaisinkytkentää ei käytetä nykyään niin paljon?
V: Navigointiin käytetään nykyään maailmanlaajuista paikannusjärjestelmää (GPS), minkä vuoksi kuollutta takaisinkytkentää ei enää tarvita niin paljon.
K: Missä tilanteissa Dead Reckoning on edelleen hyödyllinen?
V: Kuollut reaktio on hyödyllinen alueilla, joilla GPS ei ole käytettävissä, tai lyhytaikaisesti, jos GPS-päivitystä ei ole saatu.
K: Miksi on tärkeää tietää Dead Reckoningista?
V: Kuolleen ajan laskennan tunteminen on tärkeää, jos GPS-satelliitit vaurioituvat tai laitteet katoavat, jotta merenkulkijat ja lentäjät voivat edelleen navigoida.
K: Miten merimiehet kartoittivat maailmaa sen jälkeen, kun Kristoffer Kolumbus saapui Uuteen maailmaan?
V: Merimiehet käyttivät kuollutta ajanmääritystä ja tähtiä löytääkseen leveysasteensa ja kartoittaakseen maailmaa.
K: Miten Richard Byrdistä tuli ensimmäinen ihminen, joka lensi pohjoisnavalle?
V: Richard Byrd käytti Dead Reckoning -menetelmää lentäessään pohjoisnavalle vuonna 1926. Hän lensi 16 tuntia ja palasi takaisin paikkaan, josta oli lähtenyt, ja hänen allaan oli vain jääkenttiä.
Aiheeseen liittyvät artikkelit
Tekijä
AlegsaOnline.com Kuolleen ajan laskenta (Dead Reckoning) – navigointi ilman GPS Leandro Alegsa
URL: https://fi.alegsaonline.com/art/25956
Lähteet
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"