Matriisi (matematiikka) — määritelmä, laskutoimitukset ja sovellukset
Matriisi (matematiikka) — selkeä määritelmä, laskutoimitukset ja sovellukset: käytännön opas lineaarialgebraan, ohjelmointiin, fysiikkaan ja tilastotieteeseen.
Matematiikassa matriisi (monikko: matriisit) on suorakulmio, joka koostuu riveihin ja sarakkeisiin järjestetyistä numeroista. Rivit ovat vasemmalta oikealle (vaakasuorat) viivat ja sarakkeet ylhäältä alas (pystysuorat). Vasemmalla ylhäällä oleva solu on rivillä 1, sarakkeessa 1 (ks. kaavio oikealla).
Matriisit esitetään usein isoilla roomalaisilla kirjaimilla, kuten  ,
,  ja
ja  , ja matriisien yhteen- ja vähennyslaskuun sekä "kertomiseen" on olemassa säännöt, mutta säännöt ovat erilaiset kuin numeroita varten. Esimerkiksi tulo
, ja matriisien yhteen- ja vähennyslaskuun sekä "kertomiseen" on olemassa säännöt, mutta säännöt ovat erilaiset kuin numeroita varten. Esimerkiksi tulo  ei aina anna samaa tulosta kuin
ei aina anna samaa tulosta kuin  kuten tavallisten lukujen kertolaskuissa. Matriisilla voi olla enemmän kuin 2 ulottuvuutta, esimerkiksi 3D-matriisi. Matriisi voi olla myös yksiulotteinen, kuten yksi rivi tai yksi sarake.
kuten tavallisten lukujen kertolaskuissa. Matriisilla voi olla enemmän kuin 2 ulottuvuutta, esimerkiksi 3D-matriisi. Matriisi voi olla myös yksiulotteinen, kuten yksi rivi tai yksi sarake.
Kuvagalleria
1 Kuva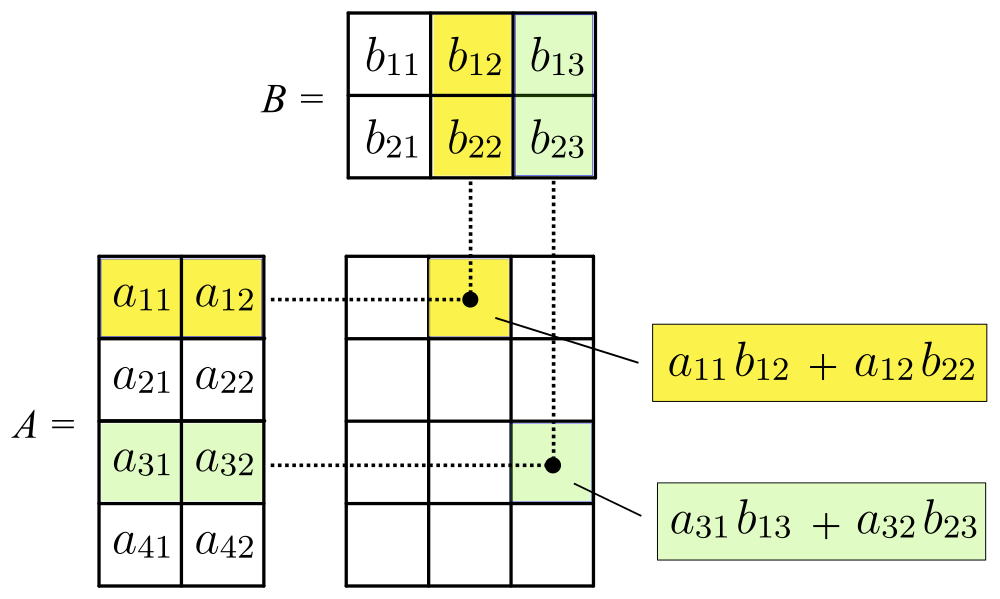
Peruskäsitteet ja notaatiot
m×n-matriisilla tarkoitetaan matriisia, jossa on m riviä ja n saraketta. Tällaisen matriisin yleinen alkiomerkintä on aij, joka tarkoittaa i:nnen rivin ja j:nnen sarakkeen alkiota. Erityistapauksia:
- Rivivektori: 1×n-matriisi (yksi rivi).
- Sarakkevektori: m×1-matriisi (yksi sarake).
- Neliömatriisi: m×m, eli saman verran rivejä ja sarakkeita.
Peruslaskutoimitukset
Yhteen- ja vähennyslasku: Matriisit voidaan laskea yhteen tai vähentää ainoastaan, jos niillä on samat mitat. Lasku tapahtuu komponenttikohtaisesti: (A±B)ij=Aij±Bij.
Skalaarilla kertominen: Matriisin kaikki alkiot kerrotaan samalla luvulla (skalaari c): (cA)ij=c·Aij.
Matriisitulo: Jos A on m×n ja B on n×p, voidaan laskea AB, joka on m×p-matriisi. Alkiot lasketaan kaavalla (AB)ij=∑k=1n AikBkj. Huomaa, että AB ei aina ole yhtä kuin BA — kertolasku ei yleensä ole kommutatiivista.
Transpoosi: Matriisin A transpoosi AT saadaan vaihtamalla rivit ja sarakkeet: (AT)ij=Aji. Transpoosin ominaisuuksia: (AT)T=A, (A+B)T=AT+BT, (AB)T=BTAT.
Neliömatriiseihin liittyvät käsitteet
Yksikkömatriisi (identiteetti) In on n×n-matriisi, jonka diagonaalialkiot ovat 1 ja muut 0. Se toimii kertolaskun yksikön tavoin: AI=IA=A.
Käänteismatriisi: Neliömatriisilla A on käänteisensä A-1, jos AA-1=A-1A=I. Käänteinen on olemassa vain, jos A on käännettävissä (eli ei singular), mikä liittyy determinantin ei-nolluuteen.
Determinantti: Neliömatriisiin määritetty skalaarinen funktio det(A) tai |A|. Determinantti kertoo esimerkiksi, moninkertaistaako matriisi tilavuuksia lineaarisen transformaation yhteydessä (abs(det(A))). Determinantti on nollasta poikkeava täsmälleen silloin, kun matriisi on käännettävissä.
Eritysmatriisit
- Nollamatriisi: kaikki alkiot 0.
- Diagonaalimatriisi: kaikki ei-diagonaaliset alkiot 0.
- Yhtäläisdiagonaalinen (skalaari) matriisi: diagonaalilla sama luku jokaisessa kohdassa.
- Kolmiomatriisit: ylä- tai alatriangularinen, eli kaikki alapuolella tai yläpuolella diagonaalia nollia.
- Symmetrinen: AT=A.
- Skew-symmetrinen (antisymmetrinen): AT=−A.
- Ortogonaalinen: ATA=I (rivien ja sarakkeiden vektorit ovat ortogonaalisia ja normaalisoituja).
Ranka ja riippuvuus
Matriisin ranka on sen riippumattomien rivi- tai sarakkeiden maksimimäärä. Ranka kertoo, kuinka monta lineaarisesti riippumatonta vektoria matriisi muodostaa, ja liittyy suoraan siihen, millaisia ratkaisuja lineaarisilla yhtälöjoukoilla on.
Ominaisarvot ja vektorit
Ominaisarvo (eigenvalue) λ ja siihen liittyvä ominaisvektori v täyttävät Av=λv. Ominaisarvot ja päävektorit ovat keskeisiä muun muassa differentiaaliyhtälöissä, stabiliteettianalyysissä ja pääkomponenttianalyysissä (PCA).
Matriisidekompositiot ja numeeriset menetelmät
Tärkeitä matriisidekompositioita ovat mm. LU-, QR-, Cholesky- ja singulaarinen arvojakauma (SVD). SVD on erityisen laaja‑alainen: se löytyy m×n-matriisille ja ilmaisee matriisin muunnoksen rotaatioksi, skaalaimeksi ja uudeksi rotaatioksi. Numeerisessa laskennassa käytetään optimoituja kirjastoja (BLAS, LAPACK) ja algoritmeja, ja suurten matriisien käsittelyssä huomioidaan kertolaskun laskennallinen kustannus (esim. perusalgoritmi O(n^3) n×n-matriiseille) sekä numeerinen vakaus.
Sovelluksia
Monet luonnontieteet käyttävät matriiseja laajasti. Monissa yliopistoissa matriiseja käsitteleviä kursseja (joita yleensä kutsutaan lineaarialgebraksi) opetetaan hyvin varhain, joskus jopa ensimmäisenä opiskeluvuotena. Matriisit ovat hyvin yleisiä myös tietojenkäsittelytieteessä, tekniikassa, fysiikassa, taloustieteessä ja tilastotieteessä.
- Lineaariset yhtälöryhmät: Ax=b — ratkaisuja tutkitaan Gaussin eliminaatiolla, LU-hajotelmalla tai muita menetelmiä käyttäen.
- Lineaariset transformaatiot: Matriisit kuvaavat avaruuden lineaarisia muunnoksia (kiertoja, skalauksia, projisointeja).
- Tietojenkäsittely ja koneoppiminen: ominaisarvoanalyysi, PCA, regressio, neural network -painot.
- Tietokonegrafiikka: koordinaattitransformaatioiden ja homogeenisten koordinaattien käsittely.
- Tilastotiede: kovarianssi- ja korrelaatiomatriisit.
- Fysiikka ja kvanttimekaniikka: operaattorit, Hamiltonit, siirtymät.
- Taloustiede: input–output-analyysit ja makrotaloudelliset mallit.
- Markov‑ketjut: siirtymämatriisit kuvaavat todennäköisyyksiä.
Esimerkkejä
2×2-matriisin A = [[a,b],[c,d]] determinantti on ad−bc. Jos det(A)≠0, niin käänteismatriisi on A-1 = (1/det(A))·[[d, −b], [−c, a]]. Tämä antaa konkreettisen tavan ratkaista pienet lineaariset järjestelmät.
Huomioita ja yleisiä ominaisuuksia
- Matriisien laskutoimitukset noudattavat assosiatiivisuutta ((AB)C=A(BC)) ja distributiivisuutta (A(B+C)=AB+AC), vaikka kertolasku ei ole kommutatiivista.
- Monissa sovelluksissa käytetään myös epätiheiden (sparse) matriisien erikoisrakenteita ja siihen sopivia tiedon esitystapoja, jotta muisti- ja aikavaativuutta voidaan vähentää.
- Termi "3D‑matriisi" viittaa usein kolmiulotteiseen taulukkoon (tensorin kaltainen rakenne). Perinteinen matriisi on kuitenkin kaksiulotteinen taulukko; korkeampiatulotteiset yleismallit kuuluvat tensoriteoriaan.
Matriisit ovat siis perusväline lineaarialgebrassa ja niillä on laaja kirjo teoreettisia ominaisuuksia sekä käytännön sovelluksia eri tieteenaloilla.

Määritelmät ja merkinnät
Matriisin vaakasuoria viivoja kutsutaan riveiksi ja pystysuoria viivoja sarakkeiksi. Matriisia, jossa on m riviä ja n saraketta, kutsutaan m x n -matriisiksi (tai m × n -matriisiksi), ja m ja n ovat sen dimensioita.
Matriisin paikkoja, joissa numerot ovat, kutsutaan merkinnöiksi. Matriisin A merkintää, joka on rivin i ja sarakkeen j kohdalla, kutsutaan A:n i,j-merkinnäksi. Tämä kirjoitetaan A[i,j] tai ai,j .
Kirjoitamme  määritelläksemme m × n -matriisin A, jonka jokaista merkintää kutsutaan nimelläi,j kaikkien 1 ≤ i ≤ m ja 1 ≤ j ≤ n osalta.
määritelläksemme m × n -matriisin A, jonka jokaista merkintää kutsutaan nimelläi,j kaikkien 1 ≤ i ≤ m ja 1 ≤ j ≤ n osalta.
Esimerkki
Matriisi

on 4×3-matriisi. Tässä matriisissa on m=4 riviä ja n=3 saraketta.
Elementti A[2,3] tai2,3 on 7.
Toiminnot
Lisäys
Kahden matriisin summa on matriisi, jonka (i,j)-osio on yhtä suuri kuin kahden matriisin (i,j)-osioiden summa:

Näillä kahdella matriisilla on samat mitat. Tällöin  on totta (ja on totta yleensä yhtä suurille matriiseille).
on totta (ja on totta yleensä yhtä suurille matriiseille).
Kahden matriisin kertominen
Kahden matriisin kertominen on hieman monimutkaisempaa:

Niin myös numeroiden kanssa:

- Kaksi matriisia voidaan kertoa keskenään, vaikka niillä olisi eri dimensiot, kunhan ensimmäisen matriisin sarakkeiden lukumäärä on yhtä suuri kuin toisen matriisin rivien lukumäärä.
- Kertomisen tulos, jota kutsutaan tuotteeksi, on toinen matriisi, jossa on sama määrä rivejä kuin ensimmäisessä matriisissa ja sama määrä sarakkeita kuin toisessa matriisissa.
- Matriisien kertolasku ei ole kommutatiivinen, mikä tarkoittaa, että yleensä
 .
. - Matriisien kertolasku on assosiatiivinen, mikä tarkoittaa, että
 .
.
Erikoismatriisit
Jotkut matriisit ovat erityisiä.
Neliömatriisi
Neliömatriisissa on yhtä monta riviä kuin saraketta, joten m=n.
Esimerkki neliömatriisista on

Tässä matriisissa on 3 riviä ja 3 saraketta: m=n=3.
Identiteetti
Jokaisella matriisin neliöulottuvuusjoukolla on erityinen vastine, jota kutsutaan "identiteettimatriisiksi" ja jota edustaa symboli  . Identiteettimatriisissa on vain nollia paitsi päädiagonaalilla, jossa on vain ykkösiä. Esim:
. Identiteettimatriisissa on vain nollia paitsi päädiagonaalilla, jossa on vain ykkösiä. Esim:

on identtinen matriisi. Kullekin neliöulottuvuusjoukolle on olemassa täsmälleen yksi identtisyysmatriisi. Identtisyysmatriisi on erityinen, koska kun mikä tahansa matriisi kerrotaan identtisyysmatriisilla, tulos on aina alkuperäinen matriisi ilman muutoksia.
Käänteismatriisi
Käänteismatriisi on matriisi, joka kerrottuna toisella matriisilla on sama kuin identtinen matriisi. Esimerkiksi:

 on käänteinen
on käänteinen 
Kaava 2x2-matriisin käänteisluvulle  on:
on:

Jossa  on matriisin determinantti. 2x2-matriisissa determinantti on yhtä suuri kuin:
on matriisin determinantti. 2x2-matriisissa determinantti on yhtä suuri kuin:

Yhden sarakkeen matriisi
Matriisia, jossa on monta riviä, mutta vain yksi sarake, kutsutaan sarakevektoriksi.
Determinantit
Determinantti ottaa neliömatriisin ja laskee yksinkertaisen luvun, skalaarin. Ymmärtääksesi, mitä tämä luku tarkoittaa, ota jokainen matriisin sarake ja piirrä se vektorina. Näiden vektoreiden piirtämällä parallelogrammilla on pinta-ala, joka on determinantti. Kaikille 2x2-matriiseille kaava on hyvin yksinkertainen: 
3x3-matriiseille kaava on monimutkaisempi: 
Suurempien matriisien determinantteja varten ei ole olemassa yksinkertaisia kaavoja, ja monet tietokoneohjelmoijat tutkivat, miten tietokoneet saadaan löytämään nopeasti suuret determinantit.
Determinanttien ominaisuudet
On olemassa kolme sääntöä, joita kaikki determinantit noudattavat. Nämä ovat:
- Identiteettimatriisin determinantti on 1
- Jos matriisin kaksi riviä tai kaksi saraketta vaihdetaan, determinantti kerrotaan -1:llä. Matemaatikot kutsuvat tätä vuorotteluksi.
- Jos kaikki yhden rivin tai sarakkeen luvut kerrotaan toisella luvulla n, determinantti kerrotaan n:llä. Myös jos matriisissa M on sarake v, joka on kahden sarakematriisin
 ja summa, on matriisin M determinantti.
ja summa, on matriisin M determinantti.  , niin M:n determinantti on M:n determinanttien summa, kun on v:n tilalla ja M:n determinantti, kun on v:n tilalla. Näitä kahta ehtoa kutsutaan monilinjaisuudeksi.
, niin M:n determinantti on M:n determinanttien summa, kun on v:n tilalla ja M:n determinantti, kun on v:n tilalla. Näitä kahta ehtoa kutsutaan monilinjaisuudeksi.
Aiheeseen liittyvät sivut
- Determinantti
- Ominaisarvot ja ominaisvektorit
- Matriisianalyysi
- Matriisitoiminto
- Numeerinen lineaarialgebra
- Lineaaristen yhtälöiden järjestelmä
- Transpose
Kysymyksiä ja vastauksia
K: Mikä on matriisi?
A: Matriisi on suorakulmio, jossa on riveihin ja sarakkeisiin järjestettyjä numeroita. Rivit ovat kukin vasemmalta oikealle (vaakasuorat) viivat, ja sarakkeet kulkevat ylhäältä alas (pystysuorat).
K: Miten matriisit esitetään?
V: Matriisit esitetään usein isoilla roomalaisilla kirjaimilla, kuten A, B ja C.
K: Mitä tapahtuu, kun kaksi matriisia kerrotaan keskenään?
V: Tuote AB ei aina anna samaa tulosta kuin BA, mikä eroaa tavallisten lukujen kertomista.
K: Voiko matriisilla olla enemmän kuin kaksi ulottuvuutta?
V: Kyllä, matriisilla voi olla enemmän kuin kaksi ulottuvuutta, esimerkiksi 3D-matriisi. Se voi olla myös yksiulotteinen, kuten yksi rivi tai sarake.
K: Missä matriiseja käytetään?
V: Matriiseja käytetään monissa luonnontieteissä ja tietotekniikassa, tekniikassa, fysiikassa, taloustieteessä ja tilastotieteessä.
K: Milloin yliopistoissa opetetaan kursseja matriiseista?
V: Yliopistoissa opetetaan yleensä matriiseja koskevia kursseja (joita yleensä kutsutaan lineaarialgebraksi) hyvin varhaisessa vaiheessa opintoja - joskus jopa ensimmäisenä opiskeluvuotena.
K: Voiko matriiseja laskea yhteen tai vähentää toisistaan?
V: Kyllä - matriisien yhteen- ja vähennyslaskuun on olemassa säännöt, mutta ne eroavat tavallisten lukujen säännöistä.
Aiheeseen liittyvät artikkelit
Tekijä
AlegsaOnline.com Matriisi (matematiikka) — määritelmä, laskutoimitukset ja sovellukset Leandro Alegsa
URL: https://fi.alegsaonline.com/art/62849